د شپږ محورونو همکار روبوټ سکرو سختولو ماشین

د وسیلې پیرامیټر
| ماډل | د GR-XFXZ950 معرفي کول |
| د روبوټ لاسرسی | ۹۵۰ ملي متره |
| د روبوټ پای بار | ۱۶ کیلو ګرامه |
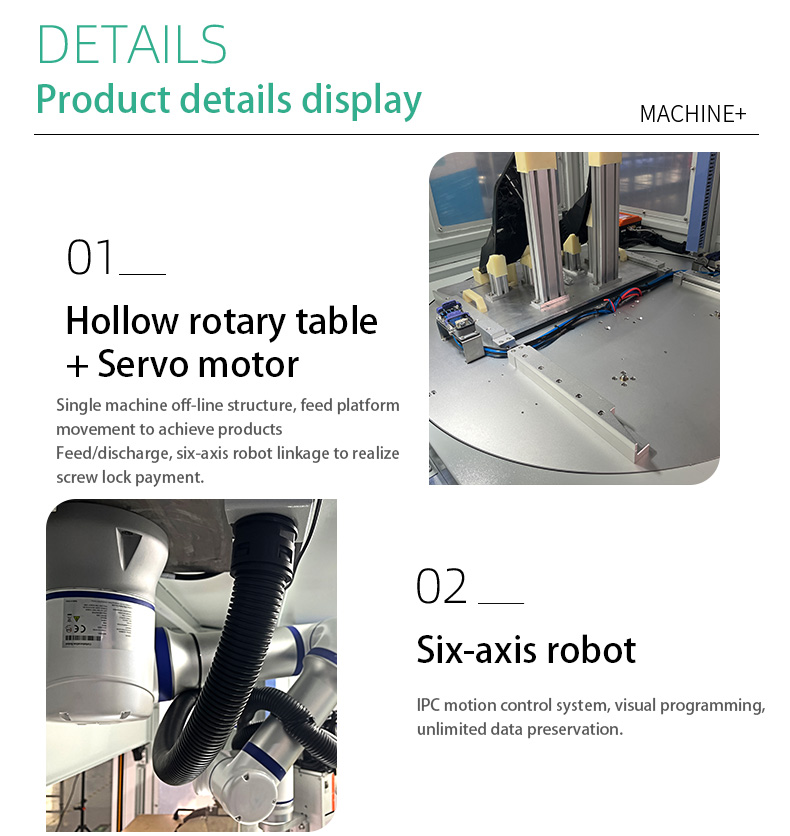
| د تغذیې پلیټ فارم | د مرکزي کنټرول روټري میز + سرو موټور |
| د تغذیې طریقه | بلو/ا سپیریټ مطابقت لري |
| د بندولو حاصلات | ۹۹.۹۵٪ |
| د بریښنا رسولو کار کول | د AC220V معرفي کول |
| د کار کولو هوا سرچینه | ۰.۴-۰.۷ میګاپکسله |
| پاور | نږدې ۲.۵ کیلو واټه |
| د همغږۍ طریقه تنظیم کړئ | بصري موقعیت |
| بهرنۍ اندازه (L*W*H) | ۱۴۰۰*۱۹۰۰*۱۹۵۰ ملي متره |
| وزن (کیلوګرامه) | ۸۰۰ |
| حالت | نوی |
| د اصلي برخو تضمین | ۲ کاله |
د وسیلې ځانګړتیاوې
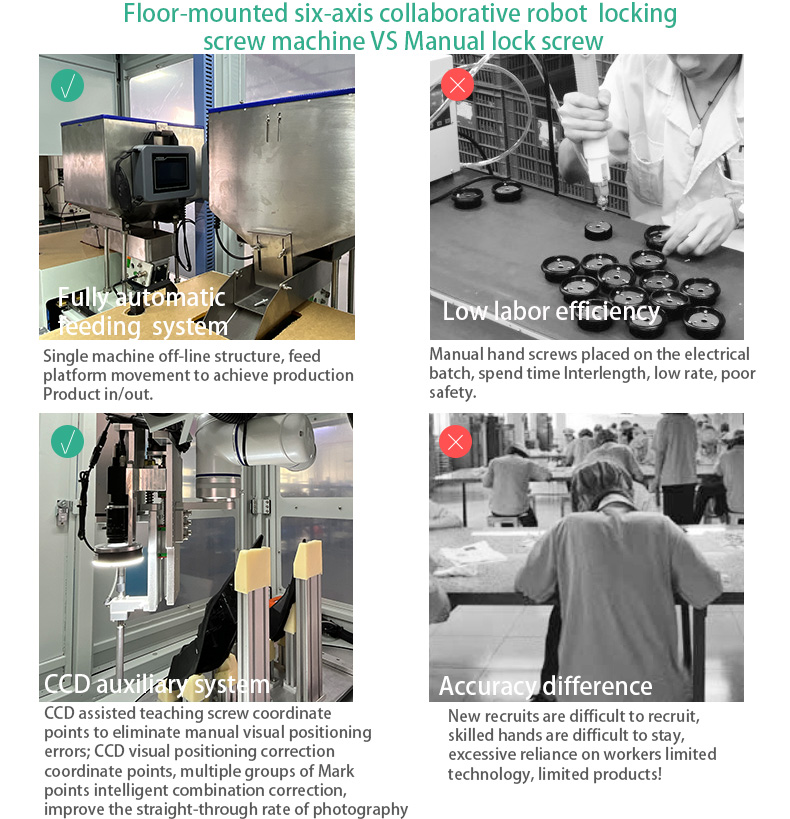
۱. د واحد ماشین آف لاین جوړښت، د محصول داخل/آؤټ پټ ترلاسه کولو لپاره د فیډ پلیټ فارم حرکت، د سکرو لاک تادیې ترلاسه کولو لپاره د شپږ محور روبوټ اړیکه
۲. د آی پي سي حرکت کنټرول سیسټم، بصري پروګرام کول، لامحدود معلومات ذخیره کول؛
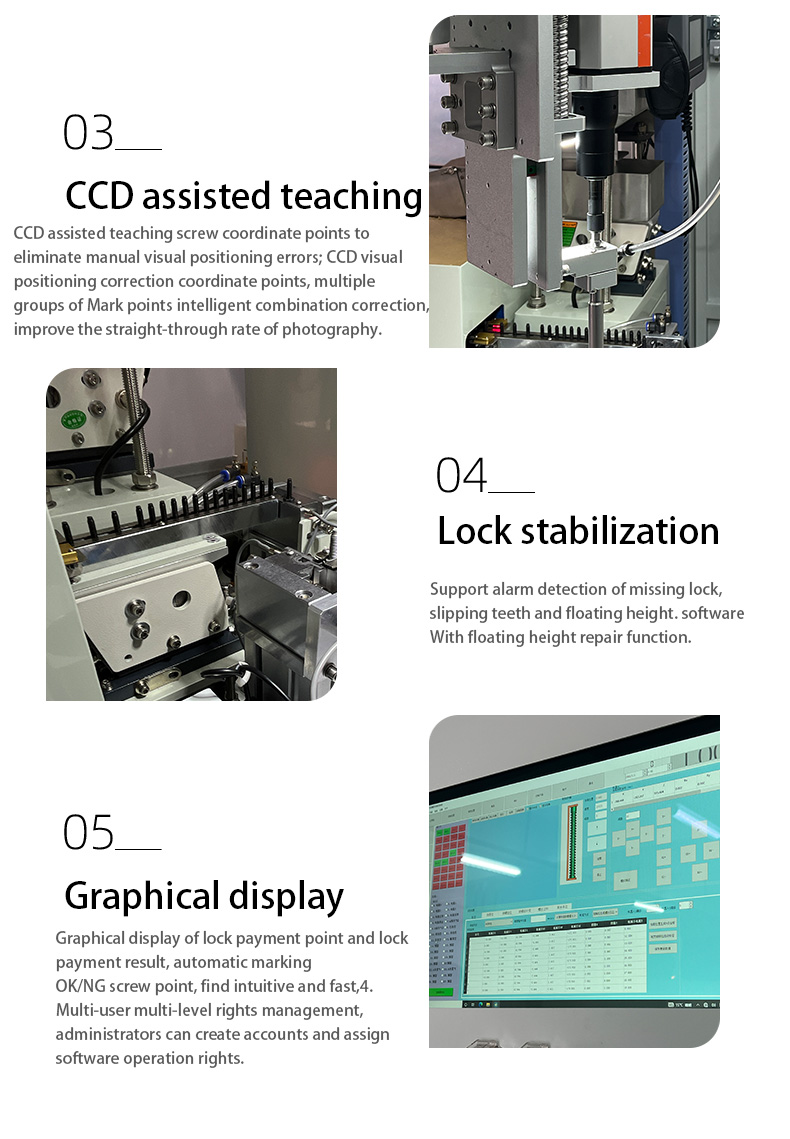
۳. په ګرافیکي ډول د لاک تادیې نقطه او د لاک تادیې پایله ښکاره کړئ، په اتوماتيک ډول د OK/NG سکرو نقطه په نښه کړئ، په زړه پورې او ګړندی ومومئ؛
۴.. د څو کاروونکو او څو کچې حقونو مدیریت، مدیران کولی شي حسابونه جوړ کړي او د سافټویر عملیاتو حقونه وټاکي.
۵. د لاسي بصري موقعیت تېروتنې له منځه وړلو لپاره د CCD د تدریس سکرو همغږي نقطو سره مرسته وکړه؛ د CCD بصري موقعیت اصلاح همغږي ټکي، د مارک پوائنټونو ډیری ګروپونه هوښیار ترکیب اصلاح، د عکس پاس کولو کچه ښه کول؛
۶. د ورک شوي قلف، د غاښونو د ښویېدو او لوړ لامبو وهلو د الارم کشف ملاتړ کوي. سافټویر د لامبو وهلو لوړوالي ترمیم فعالیت سره راځي؛
۷. د Z محور د لیزر بې ځایه کیدنې سینسر (د لامبو وهلو لوړوالي اندازه کولو لپاره) او د ښکته فشار کشف سینسر (اختیاري) سره تنظیم کیدی شي؛
۸. برقي ډله د HIOS برقي ډله، د Qili سرعت برقي ډله، د سرو برقي ډله، هوښيار برقي ډله، او داسې نورو سره سمبال کیدی شي (اختیاري)؛
۹. تجهیزات کولی شي د پیرودونکو اړتیاو سره سم MES اپلوډ کړي، لکه تورک، د ګرځیدو شمیر، زاویه، د تورک منحنی، د قلف حالت.
۱۰. لاسي سکیننګ او اتومات سکیننګ غوره کیدی شي (اختیاري)
۱۱.. د تولید معلومات تعقیب کیدی شي، او سافټویر د کیفیت کنټرول بورډ سره راځي. هر ډول معلومات اپلوډ او ډاونلوډ کیدی شي (اختیاري)؛
۱۲. د تورک نقطې اتوماتیک چک، د تورک نقطې د چک پایلې او پوښتنې ذخیره کړئ (اختیاري).

جزیات